Technical Papers
Brushless DC Motor Controller
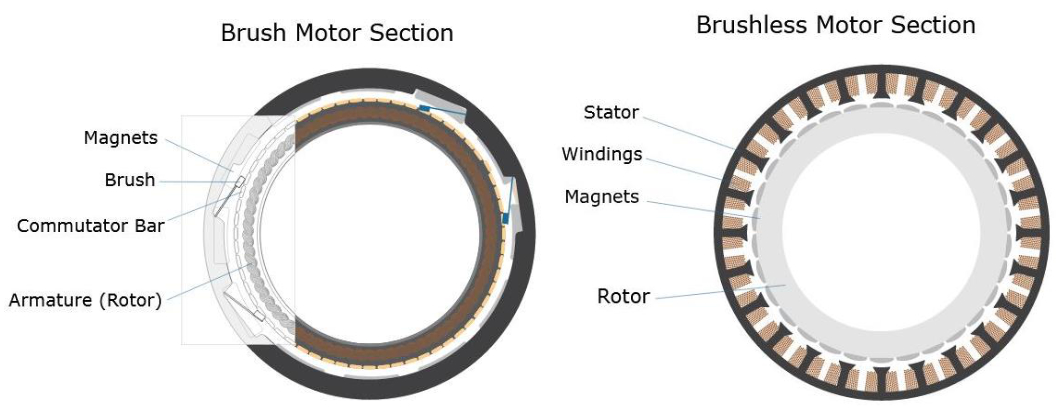
Feature packed intelligent motor controllers for brushless DC motors comprising 27 models from 20 to 500 amps, up to 120 Vdc with single and dual axis versions. The controllers can operate in one of several modes in order to sense the rotor position and sequence power to the motors 3 windings in order to generate smooth continuous rotation. The controller also uses the Hall sensor and/or Encoder information to compute speed and measure travelled distance inside a 32‐bit counter. The motors may be operated in open or closed loop speed mode, position mode or in torque mode and features several Analog, Digital and Pulse I/O’s which can be remapped as command or feedback inputs, limit switches, or many other functions. It can also accept commands received from an RC radio, analogue potentiometer, wireless modem, PLC, or microcomputer. Using CAN Bus, up to 127 controllers can be networked at up to 1Mbit/s on a single twisted pair. Numerous safety features are incorporated into the controller to ensure reliable and safe operation and can be extensively automated and customised using Basic Language scripts. The controller can be configured, monitored and tuned in real‐time using a PC utility and be reprogrammed in the field with the latest features if required.
Do More with Scripting
One of the controller’s most powerful and innovative features is the ability for the user to write programs that are permanently saved into, and run from the controller’s Flash Memory. This capability is the equivalent of combining the motor controller functionality and this of a PLC or Single Board Computer directly into the controller.
Script can be simple or elaborate and can be used for various purposes:
- Complex sequences.
MicroBasic Scripts can be written to chain motion sequences based on the status of analogue/digital inputs, motor position, or other measured parameters. For example, motors can be made to move to different count values based on the status of push buttons and the reaching of switches on the path.
Adapt parameters at run time. - MicroBasic Scripts can read and write most of the controller’s configuration settings at run time. For example, the Amps limit can be made to change during operation based on the measured heat sink temperature.
Create new functions. - Scripting can be used for adding functions or operating modes that may be needed for a given application. For example, a script can compute the motor power by multiplying the measured Amps by the measured battery Voltage, and regularly send the result via the serial port for Telemetry purposes.
Autonomous operation. - MicroBasic Scripts can be written to perform fully autonomous operations. For example the complete functionality of a line following robot can easily be written and fitted into the controller.
Manufactured by: Various
Sold and Serviced by Motion Technologies Pty Limited

Field Oriented Control
Manufactured by: Various
Sold and Serviced by Motion Technologies Pty Limited

Critical factors in sizing and designing a screw jack system
Manufactured by: Various
Sold and Serviced by Motion Technologies Pty Limited

Kollmorgen Brushed vs Brushless Servo Motors
Manufactured by: Kollmorgen
Sold and Serviced by Motion Technologies Pty Limited